
|
LongTail Driving Scenarios with Reasoning Traces: The KITScenes LongTail Dataset
Royden Wagner*, Ömer Şahin Taş*, Jaime Villa, Felix Hauser, Yinzhe Shen, Marlon Steiner, et. al. preprint, 2026 dataset / paper / benchmark A multimodal, multilingual dataset and benchmark to evaluate in-context learning and chain-of-thought reasoning in VLMs/VLAs. |
|
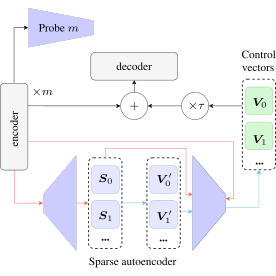
Words in Motion: Extracting Interpretable Control Vectors for Motion Transformers
Ömer Şahin Taş*, Royden Wagner* ICLR, 2025 project / arXiv / code / OpenReview / video / poster We find that neural collapse and concept alignment enable learning interpretable control vectors, which we refine with sparse autoencoders. |
|
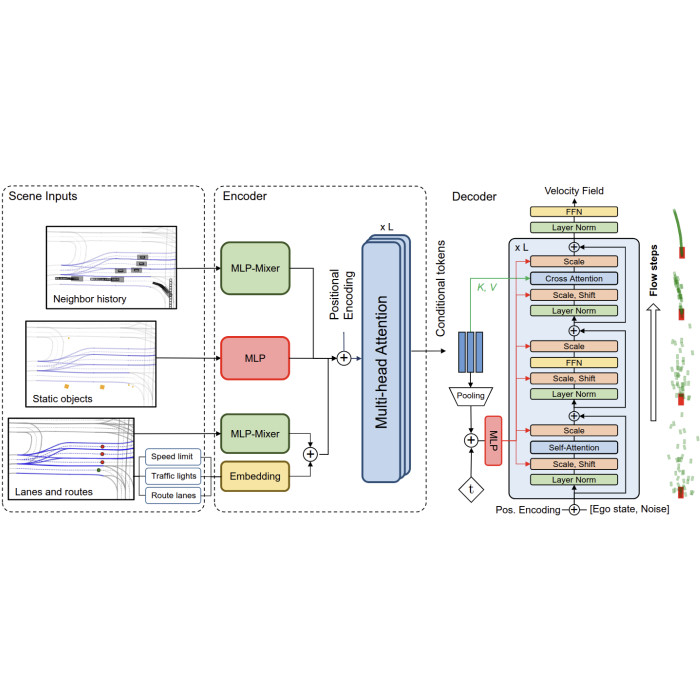
FlowDrive: moderated flow matching with data balancing for trajectory planning
Lingguang Wang, Ömer Şahin Taş, Marlon Steiner, Christoph Stiller Outperforms all prior learning-based methods by large margins on nuPlan and interPlan as of September 2025. arXiv / A conditional flow-matching planner that generates trajectories via learned rectified flow. |

|
Divide and Merge: Motion and Semantic Learning in End-to-End Autonomous Driving
Yinzhe Shen, Ömer Şahin Taş, Kaiwen Wang, Royden Wagner, Christoph Stiller TMLR, 2025 arXiv / code / OpenReview / video / poster An end-to-end autonomous driving approach that separates semantic and motion learning into parallel decoders to mitigate negative transfer. |
|
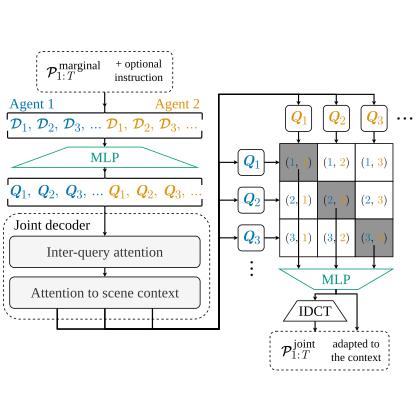
RetroMotion: Retrocausal Motion Forecasting Models are Instructable
Royden Wagner, Ömer Şahin Taş, Felix Hauser, Marlon Steiner, Dominik Strutz, Abhishek Vivekanandan, Carlos Fernandez Lopez, Christoph Stiller Awarded an honorable mention in the 2025 Waymo Interaction Prediction Challenge arXiv / code A model generating joint trajectories by re-encoding marginals. |
|
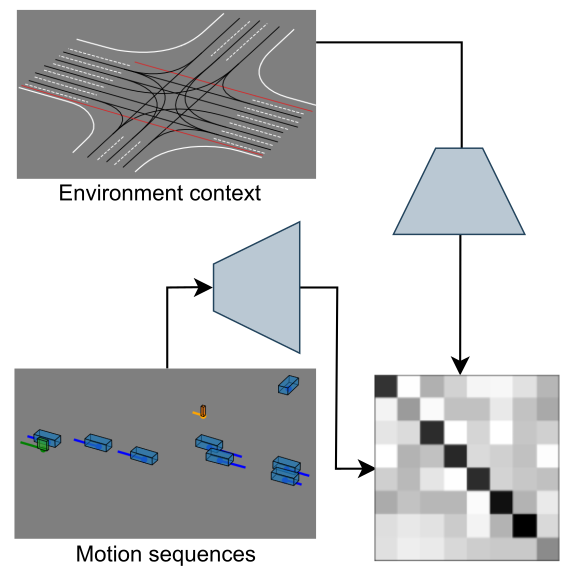
JointMotion: Joint Self-supervision for Joint Motion Prediction
Royden Wagner*, Ömer Şahin Taş*, Marvin Klemp, Carlos Fernandez Lopez CoRL, 2024 arXiv / code / OpenReview / video / poster JointMotion connects scene-level motion and environment embeddings via a non-contrastive alignment objective, then applies masked polyline modeling to unify global context and instance-level representation. |
|
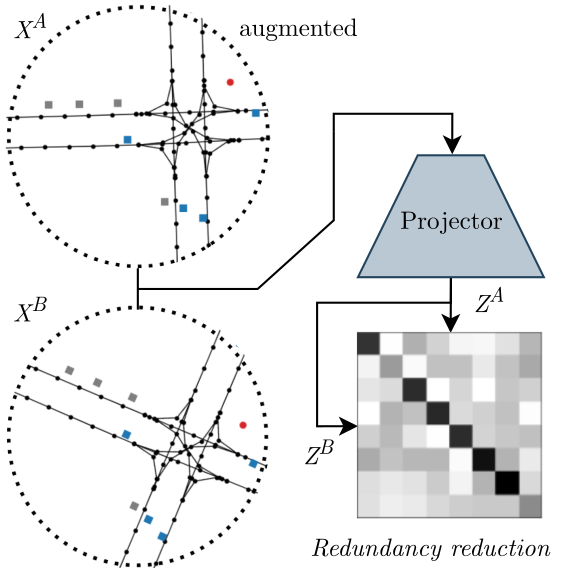
RedMotion: Motion Prediction via Redundancy Reduction
Royden Wagner, Ömer Şahin Taş, Marvin Klemp, Carlos Fernandez Lopez, Christoph Stiller TMLR, 2024 arXiv / code OpenReview RedMotion fuses local road features into a global embedding via an internal decoder, then applies self-supervised redundancy reduction across augmented views to unify local and global road representations. |

|
SceneMotion: From Agent-Centric Embeddings to Scene-Wide Forecasts
Royden Wagner, Ömer Şahin Taş, Marlon Steiner, Fabian Konstantinidis, Hendrik Königshof, Marvin Klemp, Carlos Fernandez Lopez, Christoph Stiller IEEE Intelligent Transportation Systems Conference (ITSC), 2024 arXiv / code A scene-wide motion forecasting approach that transforms local agent-centric embeddings via a latent context module. |

|
Decision-theoretic MPC: Motion Planning with Weighted Maneuver Preferences Under Uncertainty
Ömer Şahin Taş, Philipp Heinrich Brusius, Christoph Stiller arXiv:2310.17963, 2023 arXiv / code / video This paper subsumes our IV 2018, ITSC 2018, and RSS 2020 workshop papers. |

|
Smart Districts as Key Elements of Livable and Sustainable Smart Cities
Alexander Viehl, Jana Deckers, Fabian Kern, Anna Sossdorf, Benjamin Zeilfelder, Ömer Şahin Taş, Rüdiger Dillman IEEE Smart Cities Futures Summit (SCFS), 2024 paper A discussion including the role of smart mobility solutions in sustainable smart districts. |

|
Safety Reinforced Model Predictive Control (SRMPC): Improving MPC with Reinforcement Learning
Johannes Fischer, Marlon Steiner, Ömer Şahin Taş, Christoph Stiller IEEE Intelligent Transportation Systems Conference (ITSC), 2023 We combine LTV-MPC with constrained RL to generate safe reference trajectories for motion planning. |

|
Motion Planning for Autonomous Vehicles in Partially Observable Environments
Ömer Şahin Taş Ph.D. thesis, 2022 pdf / code / video My dissertation formulates motion planning under uncertainty and solves it using nonlinear MPC and Monte Carlo tree search. |

|
Sharpness Continuous Trajectory Optimization and Sparsification for Automated Vehicles
Mohit Kumar, Peter Strauss, Sven Kraus, Ömer Şahin Taş, Christoph Stiller IEEE Intelligent Vehicles Symposium (IV), 2022 paper A sharpness-continuous path optimization and sparsification approach, ensuring smooth motion under curvature and actuator constraints. |

|
Conception and Experimental Validation of a Model Predictive Control (MPC) for Lateral Control of a Truck-Trailer
Mohit Kumar, Andreas Haas, Peter Strauss, Sven Kraus, Ömer Şahin Taş, Christoph Stiller IEEE Intelligent Vehicles Symposium (IV), 2022 paper We design and experimentally validate an LTV-MPC for lateral control in truck-trailer systems, achieving precise and stable reversing maneuvers. |

|
Interaction-Aware Game-Theoretic Motion Planning for Automated Vehicles Using Bi-level Optimization
Christoph Burger, Johannes Fischer, Frank Bieder, Ömer Şahin Taş, Christoph Stiller IEEE Intelligent Transportation Systems Conference (ITSC), 2022 paper A game-theoretic motion planning algorithm that models vehicle interactions as a Stackelberg game, solved efficiently through single-level reformulation. |

|
Efficient Sampling in POMDPs with Lipschitz Bandits for Motion Planning in Continuous Spaces
Ömer Şahin Taş, Felix Hauser, Martin Lauer IEEE Intelligent Vehicles Symposium (IV), 2021 arXiv / slides / video Lipschitz-based bandits exploit the continuity of Q-values. We harness this smoothness in sampling-based POMDPs to accelerate search in large discrete action sets. Furthermore, we refine the bandits with variance-based updates to handle local discontinuities. |

|
Tackling Existence Probabilities of Objects with Motion Planning for Automated Urban Driving
Ömer Şahin Taş Christoph Stiller Workshops of the Robotics: Science and Systems (RSS), 2021 arXiv / slides / video This paper is subsumed by our journal paper. |

|
Decision-Time Postponing Motion Planning for Combinatorial Uncertain Maneuvering
Ömer Şahin Taş, Felix Hauser, Christoph Stiller IEEE Intelligent Transportation Systems Conference (ITSC), 2018 arXiv This paper is subsumed by our journal paper. |

|
Limited Visibility and Uncertainty Aware Motion Planning for Automated Driving
Ömer Şahin Taş, Christoph Stiller IEEE Intelligent Vehicles Symposium (IV), 2018 arXiv This paper is subsumed by our journal paper. |

|
How Good is My Prediction? Finding a Similarity Measure for Trajectory Prediction Evaluation
Jannik Quehl, Haohao Hu, Ömer Şahin Taş, Eike Rehder Martin Lauer IEEE Intelligent Transportation Systems Conference (ITSC), 2018 paper A comparative analysis of trajectory similarity measures for prediction evaluation. |

|
Making Bertha Cooperate - Team AnnieWAY's Entry to the 2016 Grand Cooperative Driving Challenge
Ömer Şahin Taş Niels Ole Salscheider, Fabian Poggenhans, Sascha Wirges, Claudio Bandera, Marc René Zofka, Tobias Strauss, J. Marius Zöllner, Christoph Stiller IEEE Transactions on Intelligent Transportation Systems, 2018 paper / video An overview of our autonomous driving platform that won first place in the technical category and second place overall at the GCDC 2016. |

|
Rating Cooperative Driving: A Scheme for Behavior Assessment
Christoph Burger, Piotr F Orzechowski, Ömer Şahin Taş Christoph Stiller IEEE Intelligent Transportation Systems Conference (ITSC), 2017 paper A hierarchical taxonomy for rating cooperative automated driving systems into information-based and maneuver-based levels. |

|
Automated Vehicle System Architecture with Performance Assessment
Ömer Şahin Taş, Stefan Hörmann, Bernd Schäufele, Florian Kuhnt IEEE Intelligent Transportation Systems Conference (ITSC), 2017 paper / video Building on the takeaway of our IV 2016 paper, it presents a system architecture that integrates performance assessment at every layer. |

|
Functional System Architectures towards Fully Automated Driving
Ömer Şahin Taş, Florian Kuhnt, J. Marius Zöllner, Christoph Stiller IEEE Intelligent Vehicles Symposium (IV), 2016 paper A review of autonomous vehicle system architectures, highlighting how self-aware software modules enhance robustness and reliability. |

|
Robot Operating System: A Modular Software Framework for Automated Driving
André-Marcel Hellmund, Sascha Wirges, Ömer Şahin Taş, Claudio Bandera, Niels Ole Salscheider IEEE Intelligent Transportation Systems Conference (ITSC), 2016 paper An evaluation of ROS for autonomous driving, analyzing its architecture and performance under high data load. |

|
The combinatorial aspect of motion planning: Maneuver variants in structured environments
Philipp Bender, Ömer Şahin Taş, Julius Ziegler, Christoph Stiller IEEE Intelligent Vehicles Symposium (IV), 2015 paper A refinement of my master's thesis with improved formalization, an alternative solver, and a different initialization approach. |

|
Integrating Combinatorial Reasoning and Continuous Methods for Optimal Motion Planning of Autonomous Vehicles
Ömer Şahin Taş Master's Thesis, 2014 pdf / video A motion planning framework that partitions trajectory space into multiple solution classes, enabling local optimization to find globally optimal solutions. |

|
Cooperative Adaptive Cruise Control Implementation of Team Mekar at the Grand Cooperative Driving Challenge
Levent Güvenç, İsmail Meriç Can Uygan, Kerim Kahraman, Raif Karaahmetoğlu, İlker Altay, Mutlu Şentürk, Mümin Tolga Emirler, Ahu Ece Hartavi Karcı, Bilin Aksun Güvenç, Erdinç Altuğ, Murat Can Turan, Ömer Şahin Taş, Eray Bozkurt, Ümit Özgüner, Keith Redmill, Arda Kurt, Barış Efendioğlu IEEE Transactions on Intelligent Transportation Systems, 2012 paper / video Cooperative Adaptive Cruise Control implementation of Team Mekar's GCDC 2011 vehicle that uses RTK GPS, IEEE 802.11p, and electric motor brake actuation for automated longitudinal control. |