|
FlowDrive: moderated flow matching with data balancing for trajectory planning
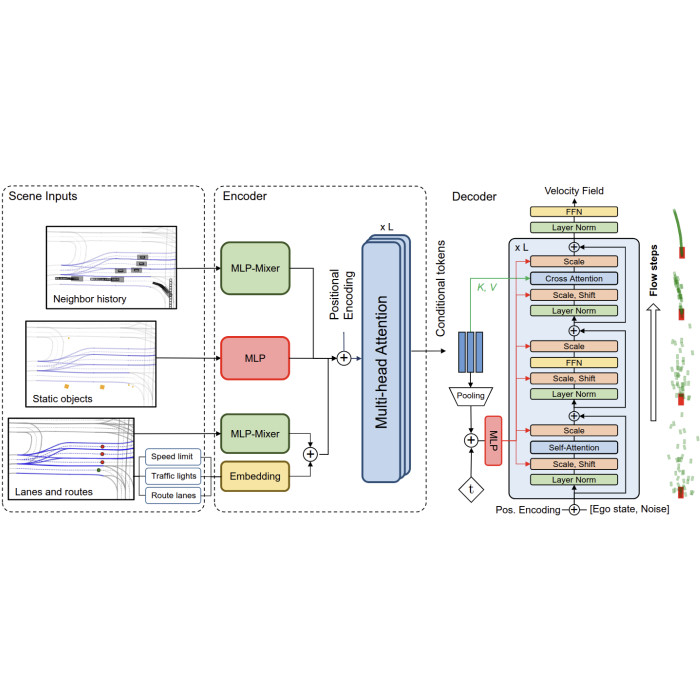
Lingguang Wang, Ömer Şahin Taş, Marlon Steiner, Christoph Stiller Outperforms all prior learning-based methods by large margins on nuPlan and interPlan as of September 2025. arXiv / A conditional flow-matching planner that generates trajectories via learned rectified flow. |
|
Information Particle Filter Tree: An Online Algorithm for POMDPs with Belief-Based Rewards on Continuous Domains
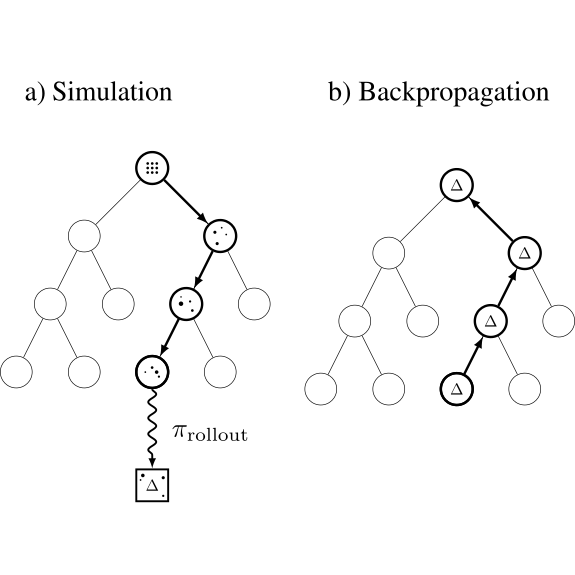
Johannes Fischer*, Ömer Şahin Taş* ICML, 2020 paper / supplemental / code / video IPFT solves continuous ρPOMDPs by combining MCTS with particle-based belief updates. It integrates an information-theoretic shaping term to accelerate search in problems where gathering information is crucial for optimal decision making. |

|
Efficient Sampling in POMDPs with Lipschitz Bandits for Motion Planning in Continuous Spaces
Ömer Şahin Taş, Felix Hauser, Martin Lauer IEEE Intelligent Vehicles Symposium (IV), 2021 arXiv / slides / video Lipschitz-based bandits exploit the continuity of Q-values. We harness this smoothness in sampling-based POMDPs to accelerate search in large discrete action sets. Furthermore, we refine the bandits with variance-based updates to handle local discontinuities. |